能够正常运行aidemo中的segment_yolov8n.py,但是替换kmodel之后,程序运行没有结果,且停止运行会卡住。模型是按照大作战步骤转的,代码是这样的,该怎么修改呢?
'''
实验平台:01Studio CanMV K230
说明:实现摄像头图像采集显示-裂缝分割-宽度计算
'''
from libs.PipeLine import PipeLine, ScopedTiming
from libs.AIBase import AIBase
from libs.AI2D import Ai2d
import os
import ujson
from media.media import *
from time import *
import nncase_runtime as nn
import ulab.numpy as np
import time
import utime
import image
import random
import gc
import sys
import aidemo
# 自定义YOLOv8分割类
class SegmentationApp(AIBase):
def __init__(self,kmodel_path,labels,model_input_size,confidence_threshold=0.2,nms_threshold=0.5,mask_threshold=0.5,rgb888p_size=[224,224],display_size=[1920,1080],debug_mode=0):
super().__init__(kmodel_path,model_input_size,rgb888p_size,debug_mode)
# 模型路径
self.kmodel_path=kmodel_path
# 分割类别标签
self.labels=labels
# 模型输入分辨率
self.model_input_size=model_input_size
# 置信度阈值
self.confidence_threshold=confidence_threshold
# nms阈值
self.nms_threshold=nms_threshold
# mask阈值
self.mask_threshold=mask_threshold
# sensor给到AI的图像分辨率
self.rgb888p_size=[ALIGN_UP(rgb888p_size[0],16),rgb888p_size[1]]
# 显示分辨率
self.display_size=[ALIGN_UP(display_size[0],16),display_size[1]]
self.debug_mode=debug_mode
# 检测框预置颜色值
self.color_four=[(255, 0, 255, 0)]
# 分割结果的numpy.array,用于给到aidemo后处理接口
self.masks=np.zeros((1,self.display_size[1],self.display_size[0],4))
# Ai2d实例,用于实现模型预处理
self.ai2d=Ai2d(debug_mode)
# 设置Ai2d的输入输出格式和类型
self.ai2d.set_ai2d_dtype(nn.ai2d_format.NCHW_FMT,nn.ai2d_format.NCHW_FMT,np.uint8, np.uint8)
# 配置预处理操作,这里使用了pad和resize,Ai2d支持crop/shift/pad/resize/affine,具体代码请打开/sdcard/app/libs/AI2D.py查看
def config_preprocess(self,input_image_size=None):
with ScopedTiming("set preprocess config",self.debug_mode > 0):
# 初始化ai2d预处理配置,默认为sensor给到AI的尺寸,您可以通过设置input_image_size自行修改输入尺寸
ai2d_input_size=input_image_size if input_image_size else self.rgb888p_size
top,bottom,left,right=self.get_padding_param()
self.ai2d.pad([0,0,0,0,top,bottom,left,right], 0, [114,114,114])
self.ai2d.resize(nn.interp_method.tf_bilinear, nn.interp_mode.half_pixel)
self.ai2d.build([1,3,ai2d_input_size[1],ai2d_input_size[0]],[1,3,self.model_input_size[1],self.model_input_size[0]])
# 自定义当前任务的后处理
def postprocess(self,results):
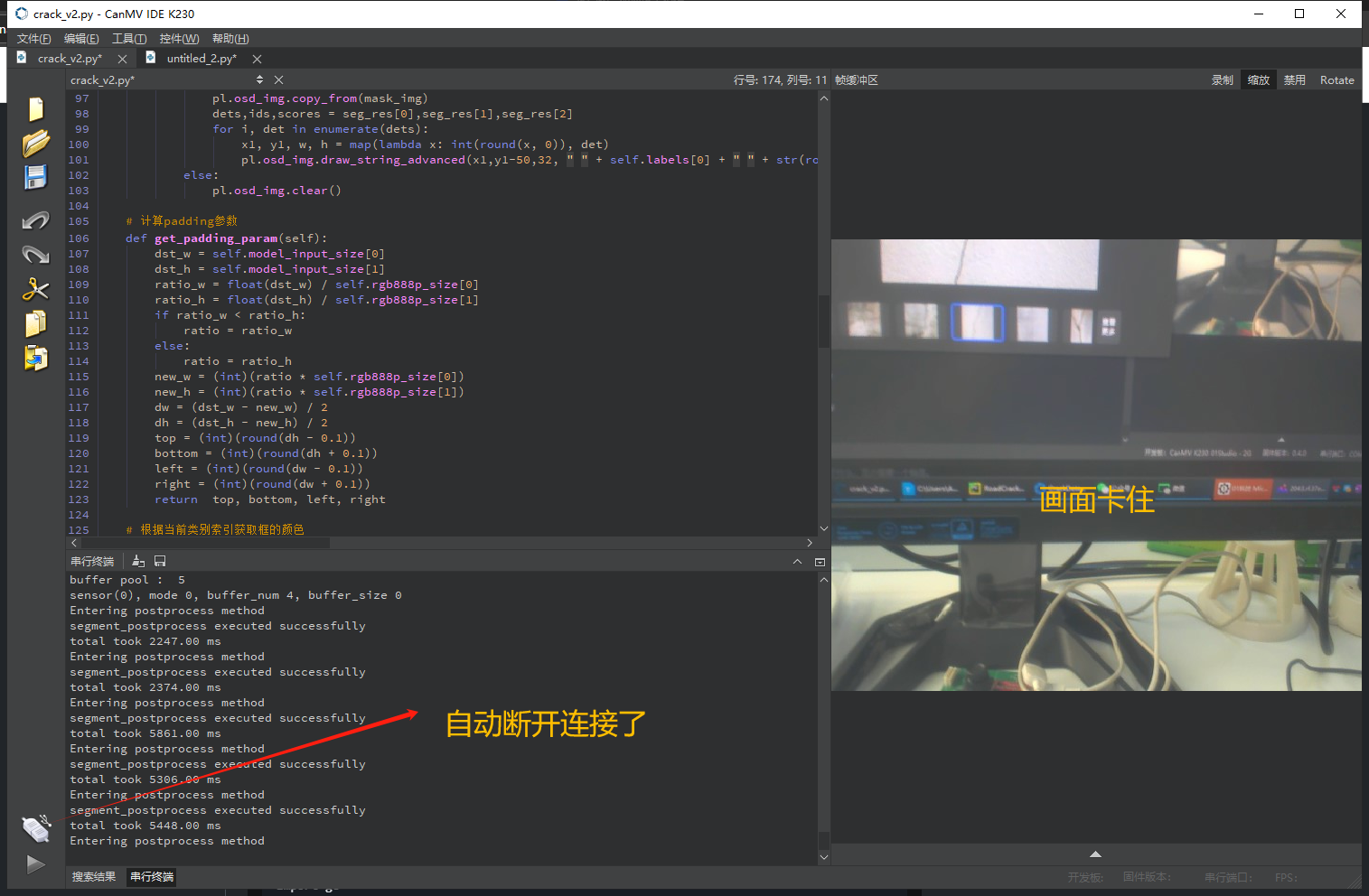
print("Entering postprocess method") # 添加调试信息
with ScopedTiming("postprocess", self.debug_mode > 0):
try:
seg_res = aidemo.segment_postprocess(results,[self.rgb888p_size[1],self.rgb888p_size[0]],self.model_input_size,[self.display_size[1],self.display_size[0]],self.confidence_threshold,self.nms_threshold,self.mask_threshold,self.masks)
print("segment_postprocess executed successfully") # 添加调试信息
except Exception as e:
print(f"Error in segment_postprocess: {e}")
# seg_res = aidemo.segment_postprocess(results,[self.rgb888p_size[1],self.rgb888p_size[0]],self.model_input_size,[self.display_size[1],self.display_size[0]],self.confidence_threshold,self.nms_threshold,self.mask_threshold,self.masks)
dets, ids, scores = seg_res
filtered_dets = []
filtered_ids = []
filtered_scores = []
for i in range(len(ids)):
if ids[i] == 0: # 只保留 "crack" 类别
filtered_dets.append(dets[i])
filtered_ids.append(ids[i])
filtered_scores.append(scores[i])
seg_res = (filtered_dets, filtered_ids, filtered_scores)
return seg_res
# 绘制结果
def draw_result(self,pl,seg_res):
with ScopedTiming("display_draw",self.debug_mode >0):
if seg_res[0]:
pl.osd_img.clear()
mask_img=image.Image(self.display_size[0], self.display_size[1], image.ARGB8888,alloc=image.ALLOC_REF,data=self.masks)
pl.osd_img.copy_from(mask_img)
dets,ids,scores = seg_res[0],seg_res[1],seg_res[2]
for i, det in enumerate(dets):
x1, y1, w, h = map(lambda x: int(round(x, 0)), det)
pl.osd_img.draw_string_advanced(x1,y1-50,32, " " + self.labels[0] + " " + str(round(scores[i],2)) , color=self.get_color(int(ids[i])))
else:
pl.osd_img.clear()
# 计算padding参数
def get_padding_param(self):
dst_w = self.model_input_size[0]
dst_h = self.model_input_size[1]
ratio_w = float(dst_w) / self.rgb888p_size[0]
ratio_h = float(dst_h) / self.rgb888p_size[1]
if ratio_w < ratio_h:
ratio = ratio_w
else:
ratio = ratio_h
new_w = (int)(ratio * self.rgb888p_size[0])
new_h = (int)(ratio * self.rgb888p_size[1])
dw = (dst_w - new_w) / 2
dh = (dst_h - new_h) / 2
top = (int)(round(dh - 0.1))
bottom = (int)(round(dh + 0.1))
left = (int)(round(dw - 0.1))
right = (int)(round(dw + 0.1))
return top, bottom, left, right
# 根据当前类别索引获取框的颜色
def get_color(self, x):
idx=x%len(self.color_four)
return self.color_four[idx]
if __name__=="__main__":
# 显示模式,默认"hdmi",可以选择"hdmi"和"lcd",k230d受限于内存不支持
display_mode="lcd"
rgb888p_size=[320,320]
if display_mode=="hdmi":
display_size=[1920,1080]
else:
display_size=[800,480]
# 模型路径
kmodel_path="/data/best.kmodel"
labels = ["Crack"]
#其它参数设置
confidence_threshold = 0.5
nms_threshold = 0.5
mask_threshold=0.5
model_input_size=[320,320]
# 初始化PipeLine
pl=PipeLine(rgb888p_size=rgb888p_size,display_size=display_size,display_mode=display_mode)
pl.create()
# 初始化自定义YOLOV8分割示例
seg=SegmentationApp(kmodel_path,labels=labels,model_input_size=model_input_size,confidence_threshold=confidence_threshold,nms_threshold=nms_threshold,mask_threshold=mask_threshold,rgb888p_size=rgb888p_size,display_size=display_size,debug_mode=0)
seg.config_preprocess()
while True:
with ScopedTiming("total",1):
# 获取当前帧数据
img=pl.get_frame()
# 推理当前帧
seg_res=seg.run(img)
# 绘制结果到PipeLine的osd图像
seg.draw_result(pl,seg_res)
# 显示当前的绘制结果
pl.show_image()
gc.collect()
seg.deinit()
pl.destroy()
软硬件版本信息
CanMV v1.2.2(based on Micropython e00a144) on 2024-12-18; k230_canmv_01studio with K230
错误日志
程序运行没有分割结果,运行一段时间画面卡住,自动断开连接或者无法终止程序。