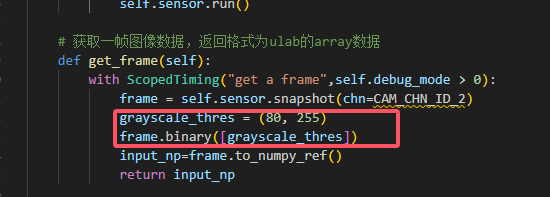
 我尝试修改pipeline中的初始化函数和getframe函数均没有办法在ide上显示二值化的图像,有没有办法修改呢?
我尝试修改pipeline中的初始化函数和getframe函数均没有办法在ide上显示二值化的图像,有没有办法修改呢?
K230 yolo 识别例程中,怎么修改摄像头参数以及AI推理输入图片参数,使其采集二值化的图像,并将二值化图像推给AI进行推理呢
Viewed 121

3 Answers

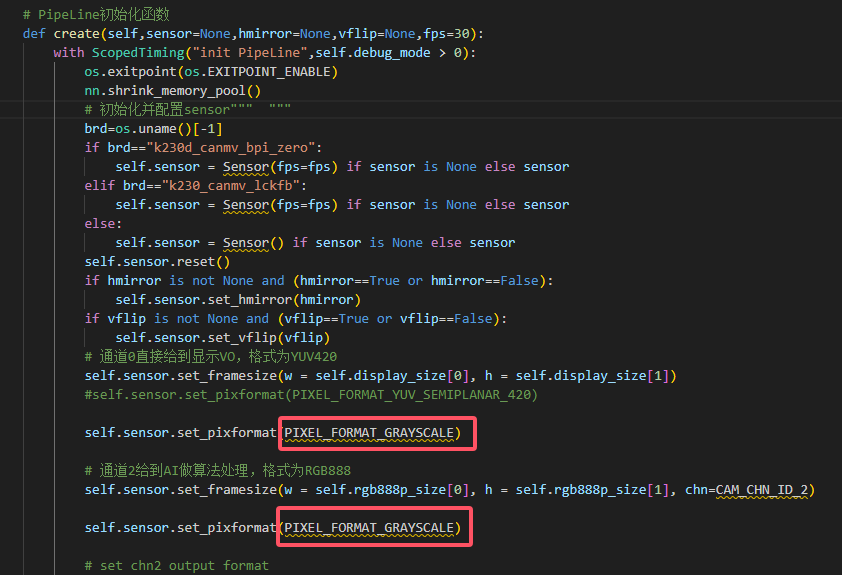
# PipeLine初始化函数
def create(self,sensor=None,hmirror=None,vflip=None,fps=30):
with ScopedTiming("init PipeLine",self.debug_mode > 0):
os.exitpoint(os.EXITPOINT_ENABLE)
nn.shrink_memory_pool()
# 初始化并配置sensor
brd=os.uname()[-1]
if brd=="k230d_canmv_bpi_zero":
self.sensor = Sensor(fps=fps) if sensor is None else sensor
elif brd=="k230_canmv_lckfb":
self.sensor = Sensor(fps=fps) if sensor is None else sensor
else:
self.sensor = Sensor() if sensor is None else sensor
self.sensor.reset()
if hmirror is not None and (hmirror==True or hmirror==False):
self.sensor.set_hmirror(hmirror)
if vflip is not None and (vflip==True or vflip==False):
self.sensor.set_vflip(vflip)
# 通道0直接给到显示VO,格式为YUV420
self.sensor.set_framesize(w = self.display_size[0], h = self.display_size[1])
**self.sensor.set_pixformat(Sensor.GRAYSCALE)**
# 通道2给到AI做算法处理,格式为RGB888
self.sensor.set_framesize(w = self.rgb888p_size[0], h = self.rgb888p_size[1], chn=CAM_CHN_ID_2)
# set chn2 output format
**self.sensor.set_pixformat(Sensor.GRAYSCALE, chn=CAM_CHN_ID_2)**
# OSD图像初始化
**self.osd_img = image.Image(self.display_size[0], self.display_size[1], image.GRAYSCALE)**
sensor_bind_info = self.sensor.bind_info(x = 0, y = 0, chn = CAM_CHN_ID_0)
Display.bind_layer(**sensor_bind_info, layer = Display.LAYER_VIDEO1)
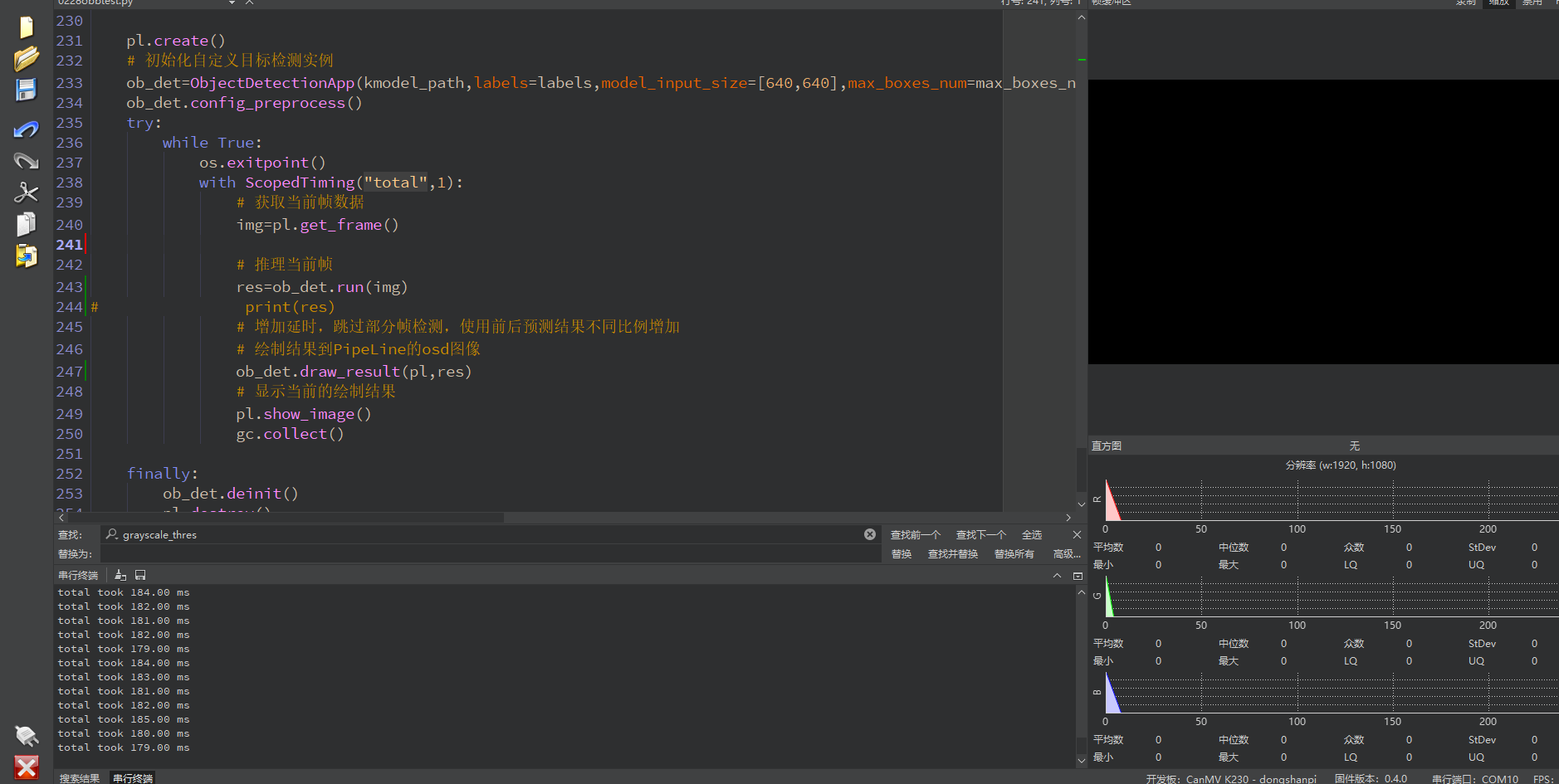
我修改了加粗的几处,并不能实现黑白采图的效果,IDE上不显示摄像头画面的同时,停止程序运行还会卡住